

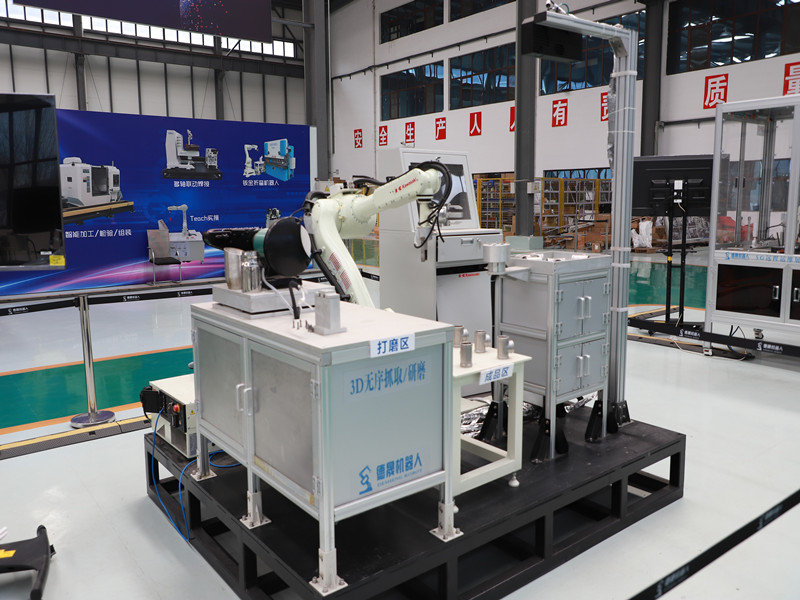
Desheng 3D Robot desordenado de agarre / molienda
Desheng 3D Robot desordenado de agarre / molienda
| Modelo | DS3D-HZ14 |
| Campo de visión cercano al final | 1200 × 1500m m |
| Campo de visión distal | 2400 × 3000 mm |
Desheng 3D Robot desordenado de agarre / molienda
Tipo de pago : L / C, T / T
Incoterm:FOB Qingdao
Pedido mínimo : 1 juego
Plazo de entrega : 30-50 días laborables
Garantía : 1 año
Post-servicio: 24 horas en línea

En vista de la escena irregular de los materiales entrantes, el sistema de visión 3D se puede utilizar para captar los materiales caóticos en desorden y luego realizar el procesamiento de carga y descarga de alta precisión de los productos a través del centrado automático.
Después del agarre, el sistema puede soportar el centro de mecanizado, carga y descarga, rectificado, soldadura, pulverización, manejo de punto fijo y otras operaciones. A través del agarre desordenado, el centrado mecánico y el pulido flotante, se puede realizar la operación eficiente de rectificado de las piezas.


